Erster Praxistest für den Weltraum-Rover von EPFL Xplore

Auf seinen sechs Rädern und ausgestattet mit einem Roboterarm, einem LIDAR-Sensor zur Abtastung des Geländes und einer Wippenaufhängung nach dem Vorbild eines von der NASA entwickelten Systems, steht der metallisch glänzende Rover im Mittelpunkt der Aufmerksamkeit. Um ihn herum versammelt, präsentieren ihn die Roboteringenieure mit grossem Vergnügen. Argos – eine Anspielung auf das mythologische griechische Schiff Argo, mit dem Jason in See stach, um das Goldene Vlies zu bergen – wurde innerhalb eines einzigen Jahres von Grund auf neu gebaut.
Argos wurde für die Teilnahme an der European Rover Challenge ausgewählt, einem der renommiertesten internationalen Wettbewerbe, und wird vom 10. bis 12. September in Kielce, Polen, auf Herz und Nieren geprüft. Die teilnehmenden Teams müssen zeigen, dass ihre Rover in der Lage sind, das Gelände zu beurteilen, bestimmte Aufgaben zuverlässig auszuführen, sich autonom oder teilautonom zu bewegen und Proben zu sammeln.
Für die vier Studierenden des EPFL Xplore-Projekts ist dies eine aufregende Gelegenheit. Sie beschlossen, einen Rover zu entwerfen, nachdem sie von der University Rover Challenge gelesen hatten, die jedes Jahr in einer Wüste im Süden Utahs stattfindet. Jonathan Wei und Quentin Delfosse, der Präsident bzw. der Vizepräsident des Vereins EPFL Xplore, sind Masterstudenten im ersten Jahr in Mikrotechnik und Robotik. Sie sind ehemalige Mitglieder des EPFL Rocket Teams und begeistern sich für die Robotik – und für eine neue Herausforderung.
Der dritte Student, der Systemingenieur Thomas Manteaux, ist für die technische Koordination des Projekts zuständig. Manteaux, der sich im zweiten Jahr seines Masterstudiums in Mikrotechnik befindet, versteht die Verbindung zwischen Robotik und Mechanik und schätzt den fächerübergreifenden Charakter des Projekts: «Es ist eine grossartige Ergänzung zu unserem Unterricht, in dem wir nicht wirklich praktische Erfahrungen sammeln können. Vor diesem Projekt hatte ich zum Beispiel noch nie eine Werkzeugmaschine angefasst. Ausserdem können wir uns so mit Studierenden aus anderen Bereichen austauschen.»
Arion Zimmermann, der vierte Argonaut, ist Masterstudent der Elektrotechnik im ersten Jahr. Er ist ein Genie im Programmieren, dem er sich seit seinem 12. Lebensjahr widmet: «Es macht mir wirklich Spass, es ist ein kreativer Akt. Man kann eine unglaublich komplexe Anwendung von Grund auf aufbauen, nur begrenzt durch die eigene Vorstellungskraft», sagt er. Nachdem er an der Entwicklung eines Bordcomputers für das EPFL-Raketenteam mitgearbeitet hatte, wollte Zimmermann seine Kreativität in einem anderen Projekt einsetzen. Er begann als Systemingenieur, doch schliesslich «baute er die Teile des Rovers, für die wir sonst niemanden finden konnten»: Er entwickelte das Kommunikationsprotokoll zwischen dem Rover und der Kontrollstation, die 600-Wh-Batterie des Rovers, das Sicherheitssystem, die Hauptstromversorgung und den Simulator, um das Verhalten der Motoren zu testen.
Einsatz, bitte!
An EPFL Xplore nehmen derzeit rund fünfzig Studierende aus verschiedenen Fachrichtungen teil. Als MAKE-Projekt wird es von der EPFL unterstützt, und die Studierenden können es als Semesterprojekt oder im Rahmen ihres Masterabschlusses anrechnen lassen. Es wird von einem akademischen Berater, Alexandre Alahi, einem Assistenzprofessor mit fester Stelle, der das EPFL-Labor für visuelle Intelligenz im Verkehrswesen (VITA) leitet, und David Rodriguez, einem Ingenieur des EPFL Space Center, betreut.
«Das Team besteht aus sieben Gruppen, die jeweils für eines der Untersysteme des Rovers verantwortlich sind. Die Koordination der Kommunikation zwischen den Gruppen und die Planung des Projekts erwiesen sich als eine Herausforderung. Wir haben den Zeitaufwand unterschätzt und mussten daher in der Endphase extrem hart arbeiten, um den Roboter vor dem Wettbewerb testen zu können», sagt Delfosse.
Vor allem die Entwicklung der Algorithmen, die die autonome Navigation steuern, hat viel mehr Zeit in Anspruch genommen als erwartet: «Die Analyse der Umgebung des Rovers und das Ausweichen vor Hindernissen erfordert viele sich überschneidende Daten, und wir brauchten Algorithmen, die gleichzeitig laufen können», sagt Delfosse. Es gab noch eine weitere Herausforderung: «Wir mussten auch eine Schnittstelle zwischen den Untersystemen schaffen, die die vierzehn Motoren des Roboters steuern, denn wir hatten zwei Kommunikationsprotokolle.»
Erfolgreiche Testergebnisse
Dem Team gelang es, diese Hindernisse zu überwinden, wozu auch die Beschaffung von Finanzmitteln gehörte: «Wir erhielten rund 115 000 Franken. Das Fundraising war anfangs recht schwierig, weil wir potenziellen Sponsoren nichts vorweisen konnten», sagt Wei, der viel über Sponsoring und Projektmanagement gelernt hat.
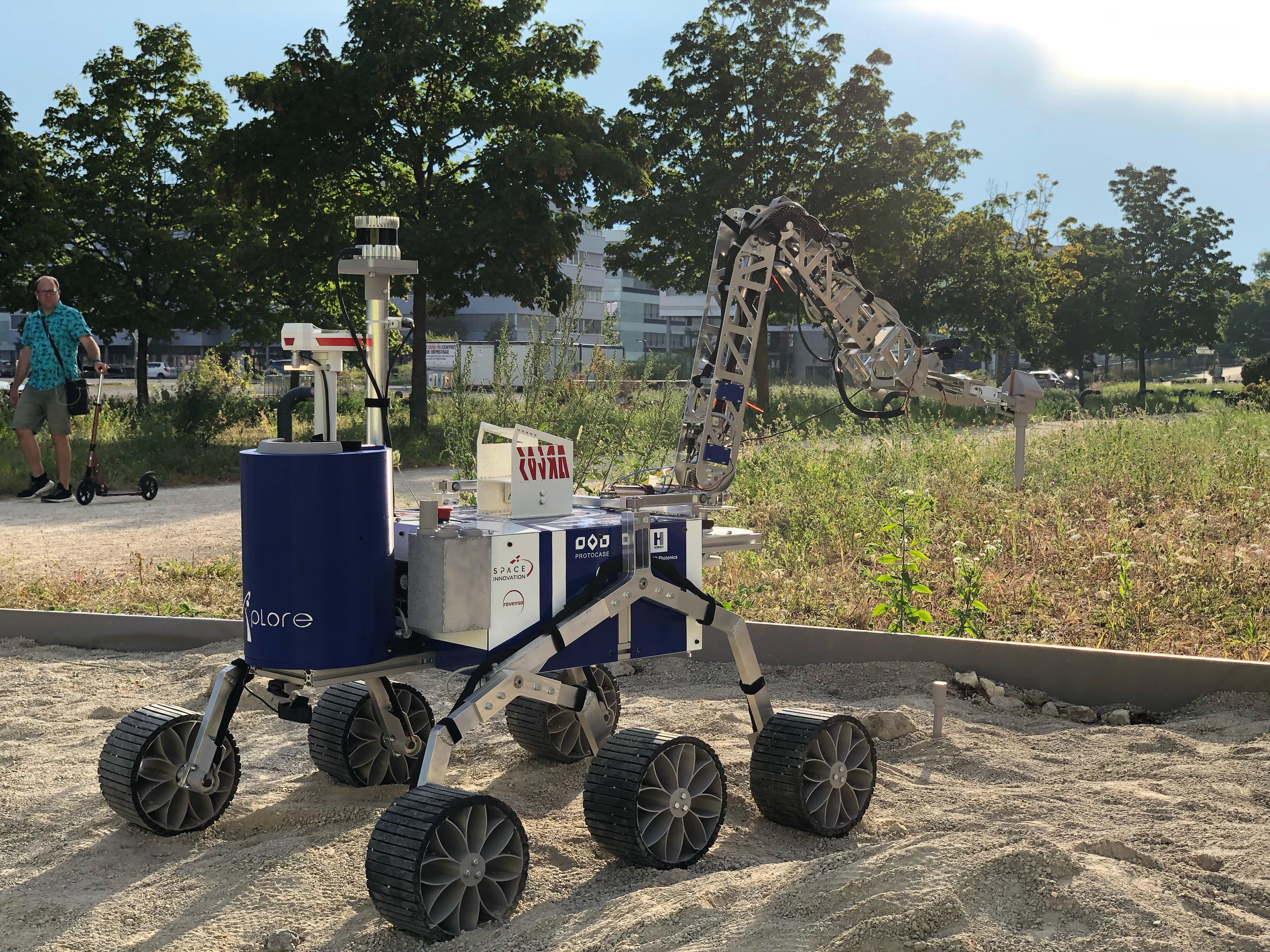
Der Rover im «Mars Yard». © EPFL Xplore 2021
Mehr als einen Monat lang konnten die EPFL Xplore-Studenten ihren Rover auf dem Campus testen und ihm den letzten Schliff geben. Dies geschah im «Mars Yard», den sie selbst angelegt hatten. Dies ist ein Rechteck aus Sand und verstreuten Steinen. «Wir sind mit dem Ergebnis sehr zufrieden. Es ist uns gelungen, einen zuverlässigen und effizienten Rover zu entwickeln, auch wenn er noch kompakter und leichter sein könnte. Seit den ersten Tests ist es uns gelungen, ihn etwas leichter zu machen, aber er wiegt immer noch mehr als die vorgeschriebenen 50 kg, und wir können einige Stahlteile nicht durch gedruckte Teile ersetzen, da letztere nicht die entsprechenden mechanischen Eigenschaften haben. Dies ist ein erster Schritt, wir haben noch Raum für Optimierungen. Der Wettbewerb wird sicherlich eine Etappe in unserer Entwicklung markieren, aber diese Etappe wird auf jeden Fall lohnend sein, unabhängig vom Ergebnis», sagen die vier Studenten, die hinter dem Projekt stehen. Diese Argonauten haben auch den Ehrgeiz, mit ihrem Roboter an der berühmten University Rover Challenge teilzunehmen. Gleichzeitig wollen sie auch einen Polarroboter für wissenschaftliche Missionen entwickeln, ein erster Schritt auf dem Weg zum Mond.
