Modell der Komplexität von Handbewegungen mit KI
In den Neurowissenschaften und der Biomedizintechnik stellt die genaue Modellierung der komplexen Bewegungen der menschlichen Hand seit langem eine grosse Herausforderung dar. Aktuelle Modelle haben oft Schwierigkeiten, das komplizierte Zusammenspiel zwischen den motorischen Befehlen des Gehirns und den physischen Aktionen von Muskeln und Sehnen zu erfassen. Diese Lücke behindert nicht nur den wissenschaftlichen Fortschritt, sondern auch die Entwicklung wirksamer Neuroprothetik zur Wiederherstellung der Handfunktion für Menschen, die ihre Gliedmassen verlieren oder gelähmt sind.
EPFL-Professor Alexander Mathis und sein Team haben einen KI-gestützten Ansatz entwickelt, der unser Verständnis dieser komplexen motorischen Funktionen erheblich verbessert. Das Team verwendete eine kreative Strategie des maschinellen Lernens, die lehrplanbasiertes Verstärkungslernen mit detaillierten biomechanischen Simulationen kombinierte.
Mathis' Forschung präsentiert ein detailliertes, dynamisches und anatomisch genaues Modell der Handbewegung, das sich direkt an der Art und Weise orientiert, wie Menschen komplizierte motorische Fähigkeiten erlernen. Diese Forschung gewann nicht nur den MyoChallenge auf der NeurIPS-Konferenz 2022, sondern die Ergebnisse wurden auch in der Zeitschrift Neuron veröffentlicht.
Baoding-Kugeln virtuell kontrollieren
«Was mich an dieser Forschung am meisten begeistert, ist, dass wir tief in die Grundprinzipien der menschlichen Motorik eintauchen – etwas, das so lange ein Rätsel war. Wir bauen nicht nur Modelle, sondern decken die grundlegenden Mechanismen auf, wie Gehirn und Muskeln zusammenarbeiten», sagt Mathis.
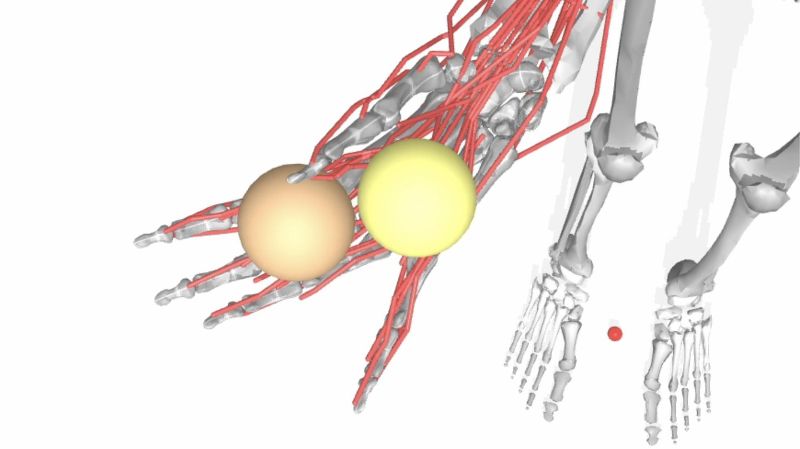
Die NeurIPS-Herausforderung von Meta motivierte das EPFL-Team, einen neuen Ansatz für eine Technik in der KI zu finden, die als Verstärkungslernen bekannt ist. Die Aufgabe bestand darin, eine KI zu entwickeln, die zwei Baoding-Kugeln präzise manipuliert – jede von ihnen wird von 39 Muskeln auf höchst koordinierte Weise gesteuert. Diese scheinbar einfache Aufgabe ist angesichts der komplexen Dynamik der Handbewegungen, einschliesslich der Muskelsynchronisation und der Aufrechterhaltung des Gleichgewichts, ausserordentlich schwierig virtuell zu reproduzieren.
In diesem hart umkämpften Umfeld haben drei Doktoranden – Alberto Chiappa aus der Gruppe von Alexander Mathis sowie Pablo Tano und Nisheet Patel aus der Gruppe von Alexandre Pouget von der Universität Genf – ihre Konkurrentinnen und Konkurrenten deutlich übertroffen. Ihr KI-Modell erreichte in der ersten Phase des Wettbewerbs eine Erfolgsquote von 100 % und übertraf damit den nächstbesten Konkurrenten. Auch in der schwierigeren zweiten Phase zeigte ihr Modell seine Stärke in immer schwierigeren Situationen und behielt einen souveränen Vorsprung, um den Wettbewerb zu gewinnen.
Die Aufgaben in kleinere Teile zerlegen - und diese wiederholen
«Um zu gewinnen, haben wir uns von der Art und Weise inspirieren lassen, wie Menschen anspruchsvolle Fähigkeiten erlernen, und zwar in einem Prozess, der in der Sportwissenschaft als Teil-zu-Ganzes-Training bekannt ist», sagt Mathis. Dieser Teil-zu-Ganzes-Ansatz inspirierte die im KI-Modell verwendete Curriculum-Lernmethode, bei der die komplexe Aufgabe der Steuerung von Handbewegungen in kleinere, überschaubare Teile zerlegt wurde.
«Um die Grenzen aktueller maschineller Lernmodelle zu überwinden, haben wir eine Methode namens Curriculum Learning angewandt. Nach 32 Phasen und fast 400 Stunden Training haben wir erfolgreich ein neuronales Netz trainiert, das ein realistisches Modell der menschlichen Hand präzise steuern kann», sagt Alberto Chiappa.
Ein wichtiger Grund für den Erfolg des Modells ist seine Fähigkeit, grundlegende, wiederholbare Bewegungsmuster, so genannte motorische Primitive, zu erkennen und zu verwenden. Dieser Ansatz zum Erlernen von Verhalten könnte den Neurowissenschaften Aufschluss darüber geben, welche Rolle das Gehirn dabei spielt, wie motorische Primitive erlernt werden, um neue Aufgaben zu bewältigen – eine spannende wissenschaftliche Wendung. Dieses komplizierte Zusammenspiel zwischen dem Gehirn und der Muskelmanipulation zeigt, wie schwierig es sein kann, Maschinen und Prothesen zu bauen, die die menschliche Bewegung wirklich nachahmen.
«Man braucht ein hohes Mass an Bewegung und ein Modell, das dem menschlichen Gehirn ähnelt, um eine Vielzahl von Alltagsaufgaben zu bewältigen. Selbst wenn jede Aufgabe in kleinere Teile zerlegt werden kann, benötigt jede Aufgabe einen anderen Satz dieser motorischen Primitive, um gut ausgeführt zu werden», sagt Mathis.
Nutzung von KI für die Erforschung und das Verständnis biologischer Systeme
Silvestro Micera, einer der führenden Forscher auf dem Gebiet der Neuroprothetik am Neuro X Institute der EPFL und Mitarbeiter von Mathis, unterstreicht die entscheidende Bedeutung dieser Forschung für das Verständnis des zukünftigen Potenzials und der derzeitigen Grenzen selbst der fortschrittlichsten Prothesen: «Was uns im Moment wirklich fehlt, ist ein tieferes Verständnis der Art und Weise, wie die Fingerbewegung und die motorische Kontrolle des Greifens zustande kommen. Diese Arbeit geht genau in diese wichtige Richtung», bemerkt Micera, «wir wissen, wie wichtig es ist, die Prothese mit dem Nervensystem zu verbinden, und diese Forschung gibt uns eine solide wissenschaftliche Grundlage, die unsere Strategie untermauert.»
Abigail Ingster, Bachelor-Studentin zum Zeitpunkt des Wettbewerbs und Empfängerin des EPFL Summer in the Labfellowship, spielte eine entscheidende Rolle bei der Analyse der Politik. Sie arbeitete eng mit dem Doktoranden Alberto Chiappa und Prof. Mathis zusammen, um die komplizierte Funktionsweise der KI-Politik zu erforschen.
