Silikonhimbeere für das Training von Ernterobotern
Himbeeren sind die ultimative Sommerfrucht. Berühmt für ihre auffällige scharlachrote Farbe und ihre besondere Struktur, bestehen sie aus Dutzenden von fleischigen Steinfrüchten mit einem süssen, aber leicht säuerlichen Fruchtfleisch. Diese zarte Struktur ist aber auch ihre grösste Schwäche, denn sie ist anfällig für den kleinsten Kratzer oder Druckstellen. Die Landwirte wissen nur zu gut, dass Himbeeren eine schwer zu erntende Frucht sind – und das spiegelt sich in ihrem Preis wider. Doch was wäre, wenn Roboter, die mit fortschrittlichen Aktoren und Sensoren ausgestattet sind, ihnen dabei helfen könnten? Die Ingenieurfachleute des Labors CREATE (Computational Robot Design & Fabrication) der EPFL haben sich genau dieser Herausforderung gestellt.
Die hohen Arbeitskosten und der Mangel an Arbeitskräften führen dazu, dass die Landwirte jedes Jahr Produkte im Wert von Millionen von Dollar verlieren – und das Problem ist noch akuter, wenn es sich um empfindliche Kulturen wie Himbeeren handelt. Für uns als Robotik-Ingenieure ist das ein spannendes Dilemma», sagt Josie Hughes, Professorin bei CREATE: «Die Erntezeit für Himbeeren ist so kurz und die Früchte sind so wertvoll, dass sie nicht verschwendet werden können. Ausserdem sind die Kosten und logistischen Herausforderungen, die mit der Erprobung verschiedener Optionen auf dem Feld verbunden sind, unerschwinglich. Deshalb haben wir uns entschlossen, unsere Tests im Labor durchzuführen und eine Himbeernachbildung für das Training von Ernterobotern zu entwickeln.»
Ein Trainingswerkzeug für Roboter
Für Uneingeweihte ist das Pflücken einer Himbeere keine leichte Aufgabe. Man muss die Beere von unten stützen, sie vorsichtig zwischen Daumen und Zeigefinger fassen und dann vorsichtig ziehen, bis sie sich vom Becher löst – dem Teil der Frucht, der an der Pflanze hängen bleibt und in die Handfläche fällt. Um Ernteroboter an diese Aufgabe zu gewöhnen, haben die CREATE-Ingenieure eine Silikonhimbeere entwickelt und gebaut, die dem Roboter «sagt», wie viel Druck ausgeübt wird, sowohl während die Frucht noch am Behälter befestigt ist als auch nachdem sie losgelassen wurde. Die Eigenschaften der Silikonhimbeere können so eingestellt werden, dass sie den Widerstand der Frucht simulieren und den Roboter auffordern, die notwendige Kraft zum Pflücken auszuüben. Dank dieser Rückmeldung können Roboter darauf trainiert werden, die Früchte zu ernten, ohne sie zu beschädigen: «Unsere sensorisierte Himbeere kann in Verbindung mit einem maschinellen Lernprogramm einem Roboter beibringen, genau die richtige Kraft anzuwenden», erklärt Doktorand Kai Junge: «Das Schwierigste ist, dem Roboter beizubringen, seinen Griff zu lockern, sobald sich die Himbeere vom Behälter löst, damit die Früchte nicht zerquetscht werden. Das ist mit herkömmlichen Robotern nur schwer zu erreichen.»

Kai Junge, Doktorand, premier auteur de l'article Erstautor der Studie, die an der RoboSoft-Konferenz 2022 präsentiert wird. © Anne-Muriel Brouet/ EPFL
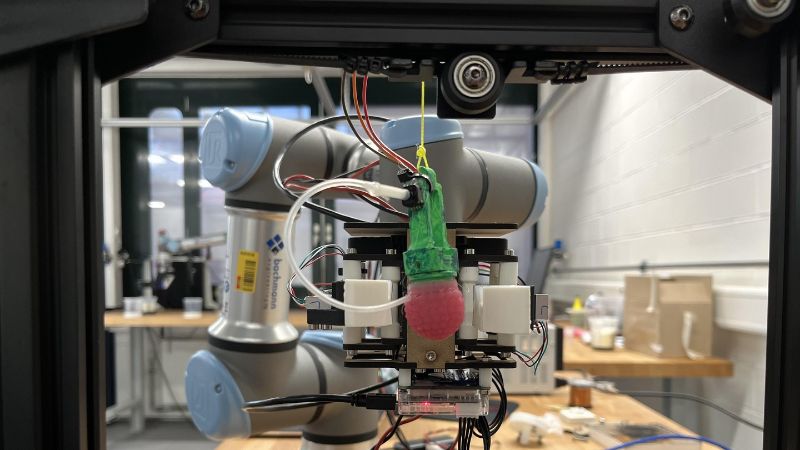
Unter ihrer unnatürlich gleichmässigen Form und der leicht durchscheinenden rosa Oberfläche ist die nachgebildete Himbeere von CREATE eine beeindruckende technische Meisterleistung. Ihr Fruchtfleisch besteht aus Silikon und ihr Gefäss aus 3D-gedrucktem Kunststoff. Ausserdem enthält sie einen Fluidiksensor, der aus einem weichen Silikonschlauch besteht und die vom Roboter ausgeübte Druckkraft misst. Die Zugkraft, die die Frucht und den Behälter zusammenhält, wird von zwei Magneten erzeugt.
Im Moment ist der Ernteroboter des Labors kaum mehr als ein Greifer mit zwei 3D-gedruckten Fingern, die mit einer dünnen Silikonschicht überzogen und an einem Roboterarm befestigt sind. Dennoch mussten die Ingenieurfachleute über ein Dutzend Himbeeren opfern, um ihren Greifer im Labor zu kalibrieren. Anschliessend führten sie eine Reihe von Tests durch, bei denen sie die nachgebildete Himbeere zunächst von Hand und dann mit dem Robotersystem pflückten.
Das CREATE-Team hat zwar den Konzeptnachweis für sein Design erbracht, aber die Technologie selbst ist noch lange nicht ausgereift: «Es ist wirklich eine unglaubliche Herausforderung», sagt Hughes, «bisher haben wir ein sehr einfaches Feedbacksystem in unserem Roboter verwendet. Der nächste Schritt wird darin bestehen, komplexere Steuerungen zu entwickeln und zu bauen, damit die Roboter Himbeeren in grösserem Umfang pflücken können, ohne sie zu zerquetschen». Die Ingenieurinnen und Ingenieure entwickeln derzeit ein Kamerasystem, mit dem die Roboter die Himbeeren nicht nur «fühlen», sondern auch «sehen» können, wo sie sich befinden und ob sie bereit für die Ernte sind. Sie planen, ihren Ernteroboter in diesem Sommer auf dem Feld zu testen, wenn die lokale Himbeersaison auf dem Höhepunkt ist.
«Wir möchten die Technologie auch für anderes Beerenobst entwickeln und das Konzept der physischen Zwillinge auf kompliziertere Aufgaben wie andere Beeren, Tomaten, Aprikosen oder Trauben anwenden», sagt Hughes.
