Ein schwimmender Miniaturroboter inspiriert von Meeresplattwürmern
Schwimmroboter spielen eine wichtige Rolle bei der Kartierung der Umweltverschmutzung, der Untersuchung aquatischer Ökosysteme und der Überwachung der Wasserqualität in sensiblen Gebieten wie Korallenriffen oder Seeufern. Viele Geräte sind jedoch mit lauten Propellern ausgestattet, die die Tierwelt stören oder schädigen können. Die natürliche Unordnung in diesen Umgebungen - einschließlich Pflanzen, Tieren und Unrat - stellt ebenfalls eine Herausforderung für Roboterschwimmer dar.
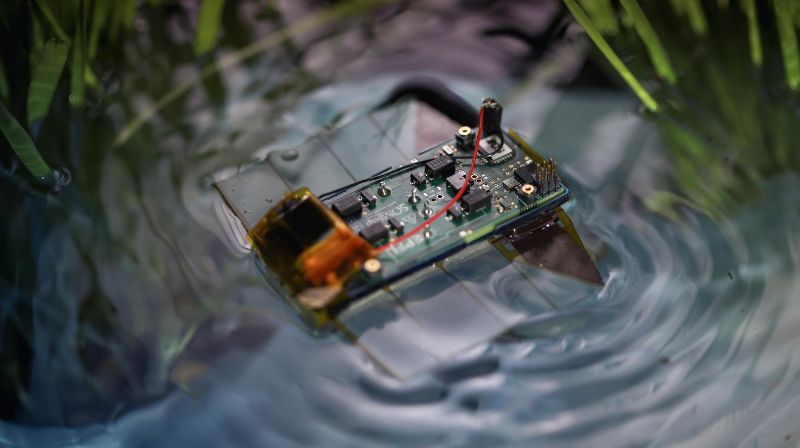
Forscher des Soft Transducers Lab und des Labors für instationäre Strömungsdiagnostik der EPFL-Fakultät für Ingenieurwesen sowie des Max-Planck-Instituts für Intelligente Systeme haben nun einen kompakten und vielseitigen Roboter entwickelt, der durch enge Räume manövrieren und Nutzlasten transportieren kann, die viel schwerer sind als er selbst. Der flinke Schwimmroboter, der kleiner als eine Kreditkarte ist und nur 6 Gramm wiegt, eignet sich ideal für Umgebungen mit begrenztem Platz, wie z. B. Reisfelder, oder für die Durchführung von Inspektionen in Maschinen auf dem Wasser. Die Forschungsarbeit wurde veröffentlicht in Science Robotics veröffentlicht.
«Im Jahr 2020 hat unser Team autonome Krabbelroboter in Insektengrösse vorgeführt, aber die Herstellung von ungefesselten, ultradünnen Robotern für aquatische Umgebungen ist eine ganz neue Herausforderung», sagt Herbert Shea, Leiter des EPFL Soft Transducers Lab: «Wir mussten bei Null anfangen und leistungsstärkere weiche Aktoren, neue Strategien für die wellenförmige Fortbewegung und kompakte Hochspannungselektronik entwickeln».
Miniaturelektronik für autonomen Betrieb
Im Gegensatz zu herkömmlichen propellerbasierten Systemen verwendet der EPFL-Roboter zum Antrieb geräuschlos wellenförmige Flossen, die von marinen Plattwürmern inspiriert sind. Dieses Design und sein geringes Gewicht ermöglichen es dem Roboter, auf der Wasseroberfläche zu schwimmen und sich nahtlos in die natürliche Umgebung einzufügen.
«Unser Design ahmt nicht einfach die Natur nach, sondern geht über das hinaus, was natürliche Organismen erreichen können», erklärt der ehemalige EPFL-Forscher Florian Hartmann, heute Forschungsgruppenleiter am Max-Planck-Institut für Intelligente Systeme in Stuttgart.
Indem er seine Flossen bis zu zehnmal schneller schwingt als Meeresplattwürmer, kann der Roboter beeindruckende Geschwindigkeiten von 12 Zentimetern (2,6 Körperlängen) pro Sekunde erreichen. Durch den Einsatz von vier künstlichen Muskeln zum Antrieb der Flossen erreicht der Roboter ausserdem eine noch nie dagewesene Manövrierfähigkeit. Er kann nicht nur vorwärts schwimmen und sich drehen, sondern auch kontrolliert rückwärts und seitwärts schwimmen.
Für den Antrieb des Roboters entwickelten die Forschenden ein kompaktes elektronisches Steuersystem, das die Aktoren des Roboters mit bis zu 500 Volt bei einer geringen Leistung von 500 Milliwatt versorgt – viermal weniger als eine elektrische Zahnbürste. Trotz der Verwendung von Hochspannung sind die geringen Ströme und die abgeschirmten Schaltkreise des Roboters völlig sicher für seine Umgebung. Lichtsensoren fungieren als einfache Augen, die es dem Roboter ermöglichen, selbstständig Lichtquellen zu erkennen und ihnen zu folgen.
Die Forschenden stellen sich vor, dass der Roboter unter anderem zu ökologischen Studien, zur Verfolgung von Umweltverschmutzung und zur Präzisionslandwirtschaft beiträgt. Die nächsten Schritte umfassen die Entwicklung einer robusteren Plattform für Feldtests.
«Die grundlegenden Erkenntnisse aus diesem Projekt werden nicht nur die Wissenschaft der bioinspirierten Robotik voranbringen, sondern auch den Grundstein für praktische, lebensechte Robotersysteme legen, die mit der Natur harmonieren», sagt Hartmann.
